In this blog, I will introduce several classic cnn frameworks, including VGG, googleNet, resNet, DenseNet, each one with a absolute new perspective, greatly promotes the development of computer vision.
1. LeNet-5
LeNet-5, a classical convolutional neural network that was introduced back to 1998, is aimed to recognize the digits from 0-9. The first figure below is the model architecture form the paper and the second one is the figure that is similar to figure 1. LeNet-5 is such a classical model that it consists of two convolution layers followed be average pooling layers for each and apply three fully connected layers in the end of the network. The second model is quite similar to LeNet-5 except using max pooling layers.
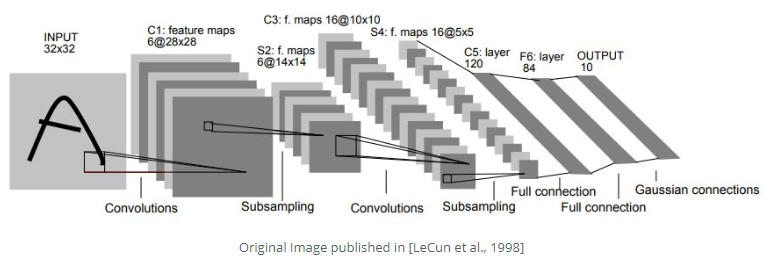
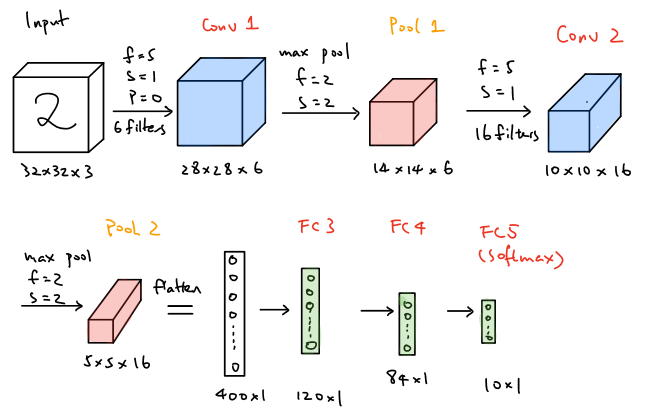
As shown above fot the LeNet-5 modified model, the network takes a softmax.
Take the second architecture as an example, let’s practice how to compute the amounts of the parameters that are needed to learn in each layer of the network.
| Layers | Activation Size | Number of Parameters |
|---|---|---|
| 0 | ||
| 0 | ||
| 0 | ||
Where sigmoid after each max pooling layer. In summary, the total number of of parameters that the network needs to learn is approximately 65000. According to this classical architecture, there are actually several patterns that the modern architectures still apply, which are the general structures of the networks, . That is, convolution layers are followed by pooling layers and a few of fully connected layers are located in the end of the metwork. Additionally, the trends of nowadays networks that
Below are codes of LeNet-5 implemented by pytoch1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27import torch.nn as nn
import torch
class LeNet(nn.Module):
"""This class implements the classical LeNet-5 network"""
def __init__(self, in_clannels, out_channels) -> None:
super().__init__()
#Here we need to specify the size of the input as 32 * 32 *3
self.nn = nn.Sequential(
nn.Conv2d(1, 6, kernel_size = 5, stride = 1, padding = 0),
nn.Sigmoid(),
nn.MaxPool2d(kernel_size = 2, stride = 2),
nn.Conv2d(6, 16, 5, 1),
nn.Sigmoid(),
nn.MaxPool2d(kernel_size = 2, stride = 2),
nn.Flatten(),
nn.Linear(400, 120),
nn.Sigmoid(),
nn.Linear(120, 84),
nn.Sigmoid(),
nn.Linear(84, out_channels),
nn.Softmax() # Here we need to notice that Softmax is neccssary
)
def forward(self, x):
return self.nn(x)
2. AlexNet
AlexNet, intriduced in 2012, employs an 8-layer convolutional neural network where the architecture is quite similar to LeNet-5, but there are also some significant differences. First, AlexNet is much deeper since it consists of finve convolution layers, two hidden fully-connected layers and one onle fully-connected output layer as shown in the figure below. Aside from that, AlexNet used the ReLU activation function instead of Sigmoid and the ReLu function is processed after each convolution layer. Futhermore, dropout is also used after each fully connected layer except the output layer.
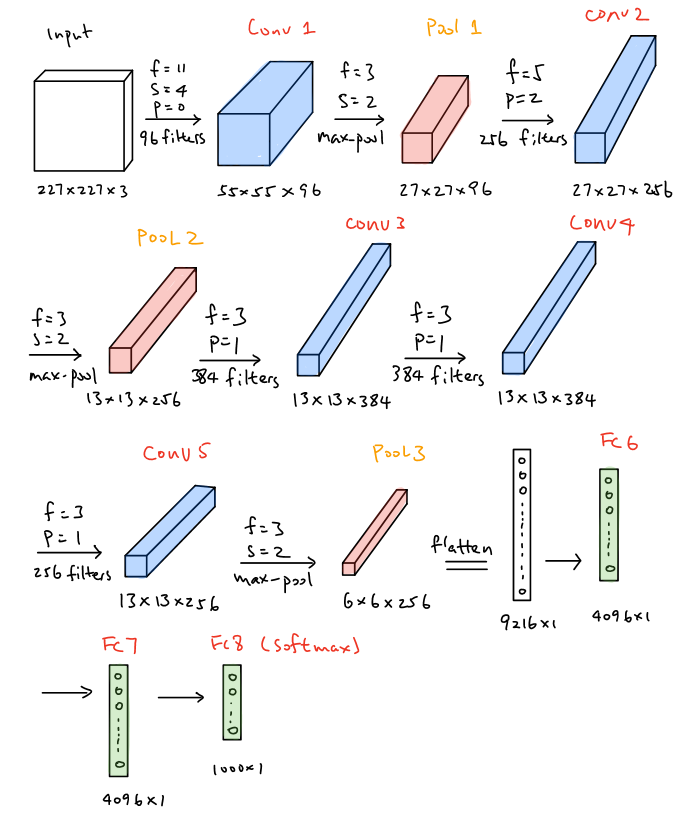
In the first layer of Alexnet, the convolution filter size is
The amounts of the parameters that are needed to learn in each layer of the network is demonstrated below.
| Layers | Activation Size | Number of Parameters |
|---|---|---|
| 0 | ||
| 0 | ||
| 0 | ||
| 0 | ||
The total number of parameters needed to learn in AlexNet is approximately 60 million, which are way larger than LeNet-5 are. The pytorch version code of AlexNet is illustrated below1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35import torch.nn as nn
import torch
class AlexNet(nn.Module):
"""This class implements the classical AlexNet network"""
def __init__(self, in_clannels, out_channels) -> None:
super().__init__()
#Here we need to specify the size of the input as 32 * 32 *3
self.nn = nn.Sequential(
nn.Conv2d(in_channels, 96, kernel_szie = 11, stride = 4, padding = 1),
nn.ReLU(),
nn.MaxPool2d(kernel_size = 3, stride = 2),
nn.Conv2d(96, 256, kernel_szie = 5, stride = 1, padding = 2),
nn.ReLU(),
nn.MaxPool2d(kernel_size = 3, stride = 2),
nn.Conv2d(256, 384, kernel_szie = 3, stride = 1, padding = 1),
nn.ReLU(),
nn.Conv2d(384, 384, kernel_szie = 3, stride = 1, padding = 1),
nn.ReLU(),
nn.Conv2d(384, 256, kernel_szie = 3, stride = 1, padding = 1),
nn.ReLU(),
nn.MaxPool2d(kernel_size = 3, stride = 2),
nn.Flatten(),
nn.Linear(6400, 4096),
nn.ReLU(),
nn.Dropout(p = 0.5),
nn.Linear(4096, 4096),
nn.ReLU(),
nn.Dropout(p = 0.5),
nn.Linear(4096, 1000),
nn.Softmax()
)
def forward(self, x):
return self.nn(x)
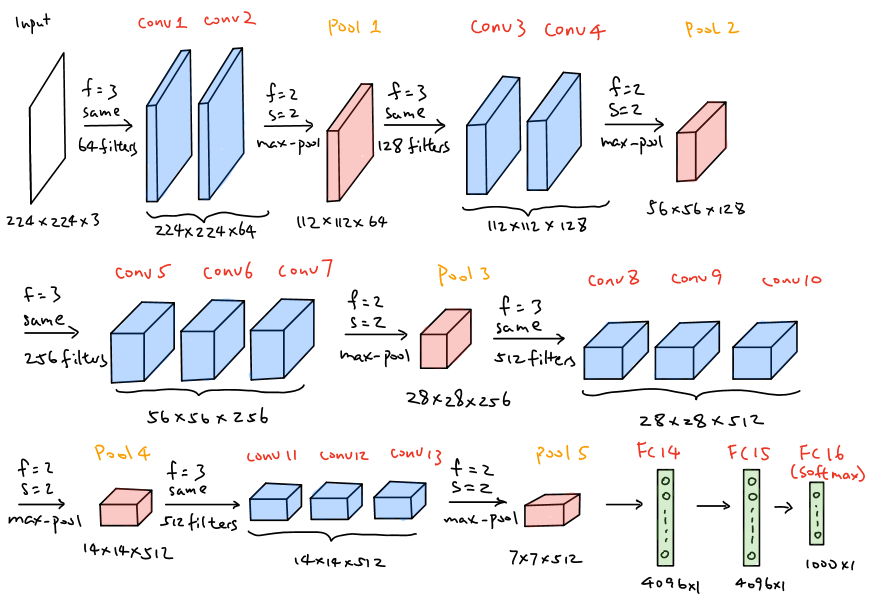
3. VGG-16
VGG-16, introduced in 2014, employs a 16-layer network, which is much deeper than ALexNet but offers a simpler network by replacing large kernel size filters withi multiple 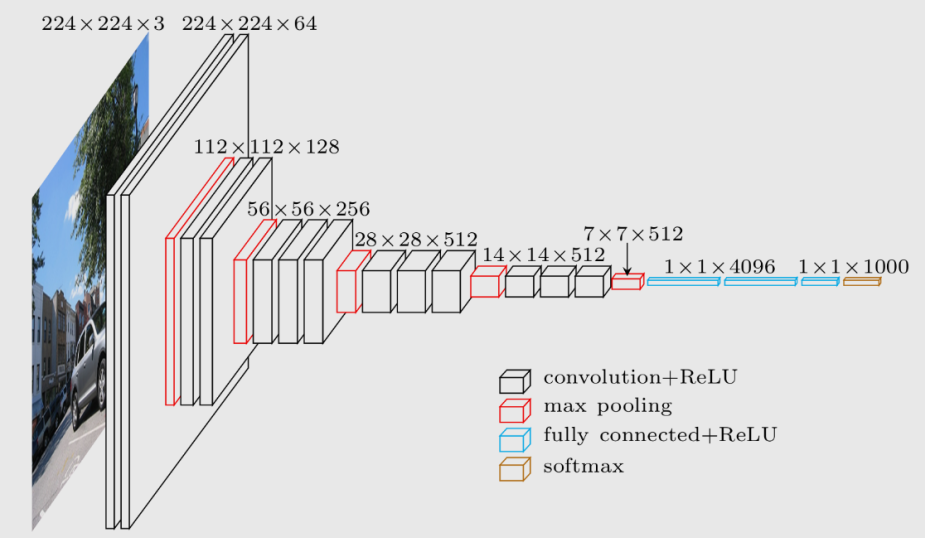
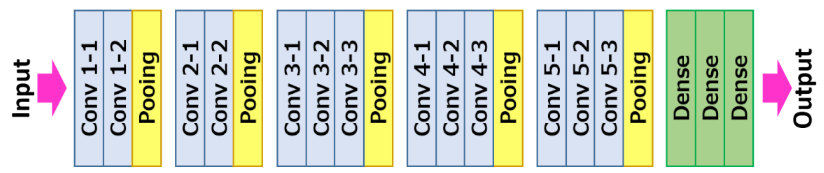
The patterns of VGG-16 are quite uniform that the network takes
The pytorch version of VGG-16 is illustrated as follow1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49from sympy import Mul
import torch.nn as nn
import torch
class VGG_16(nn.Module):
"""This class implements the classical LeNet-5 network"""
def __init__(self, in_clannels, out_channels) -> None:
super().__init__()
#Here we need to specify the size of the input as 32 * 32 *3
self.nn = nn.Sequential(
MultiConv(in_clannels, 64, 2),
MultiConv(64, 128, 2),
MultiConv(128, 256, 3),
MultiConv(256, 512, 3),
MultiConv(512, 512, 3),
nn.Flatten(),
nn.Linear(7*7*512, 4096),
nn.ReLU(inplace = True),
nn.Dropout(p = 0.5),
nn.Linear(4096, 4096),
nn.ReLU(inplace = True),
nn.Dropout(p = 0.5),
nn.Linear(4096, out_channels),
nn.Softmax()
)
def forward(self, x):
return self.nn(x)
class MultiConv(nn.Module):
"""This class implements double conv operation"""
def __init__(self, in_channels, out_channels, num_conv) -> None:
super().__init__()
multi_Conv = [nn.Conv2d(out_channels, out_channels, kernel_size = 3, stride = 1, padding = 1)] * (num_conv - 1)
self.multiConv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size = 3, padding = 1, stride = 1),
*multi_Conv,
nn.ReLU(inplace = True),
nn.MaxPool2d(kernel_size = 2, stride = 2)
)
def forward(self, x):
return self.nn(x)
if __name__ == "__main__":
model = VGG_16(1, 1000)
print(model)
4.GoogleNet
The inception Network was one of the major breakthroughs in the fields Neural metowrks, particularly for CNNs, So far there are three versions of inception Networks, which are named Inception version 1,2 and 3. The first version entered the field in 2014. and as the name “GoogleNet” suggests, it was developed by a team at google. This network was responsible for setting state of art for classification and detection in the ILSVRC. The first version of the Inception networks is referred to as GoogleNet.
if a network is built with many deep layers it might face the problem of overfitting. To solve this problem, the authors in the research paper Going deeper with convolutions proposed the GoogleNet architecture with the idea of having filters with multiple sizes that can operate on the same level. With this idea, the network actually becomes wider ranther deeper. Below is an image showing a Naive inception Module.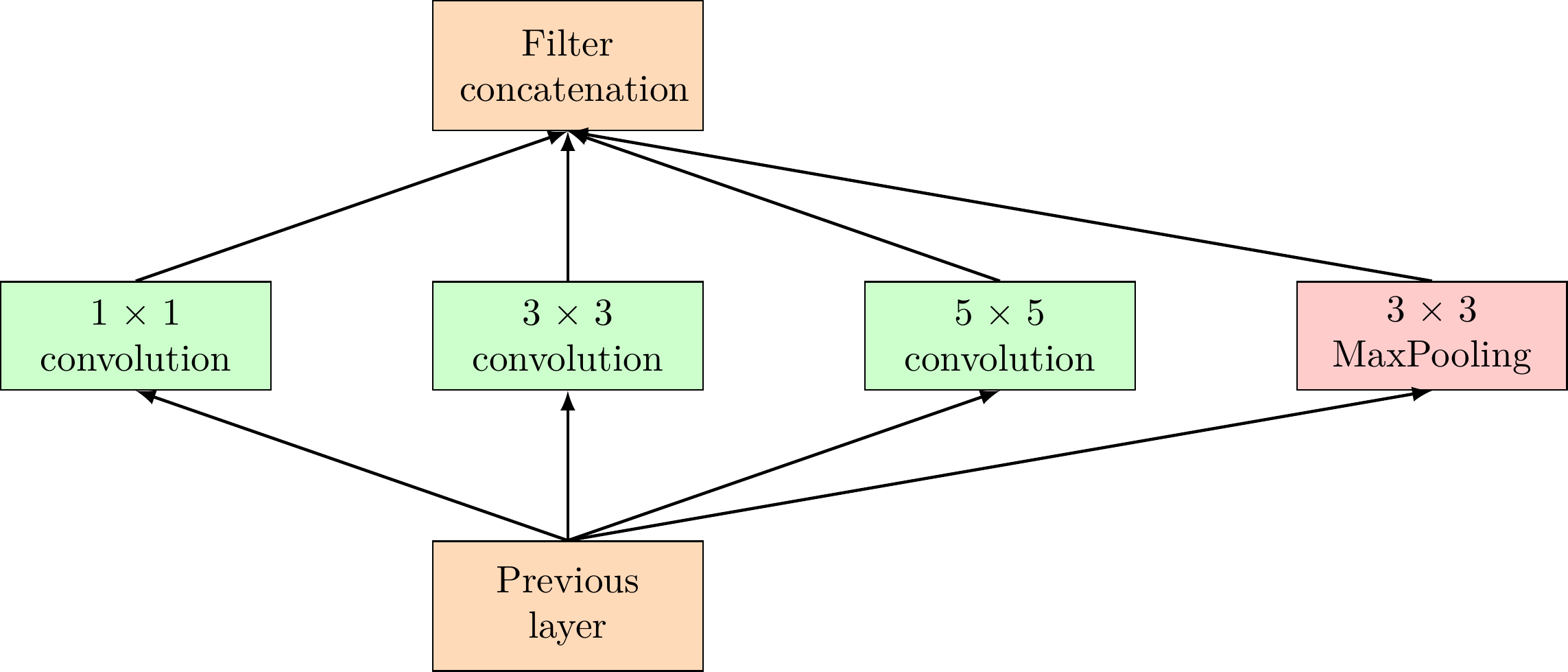
As can be seen in the above diagram, the convolution operation is performed on inputs with three filter sizes:
Since neural networks are time-consuming and expensive to train, the authors limit the number of input channels by adding an extra 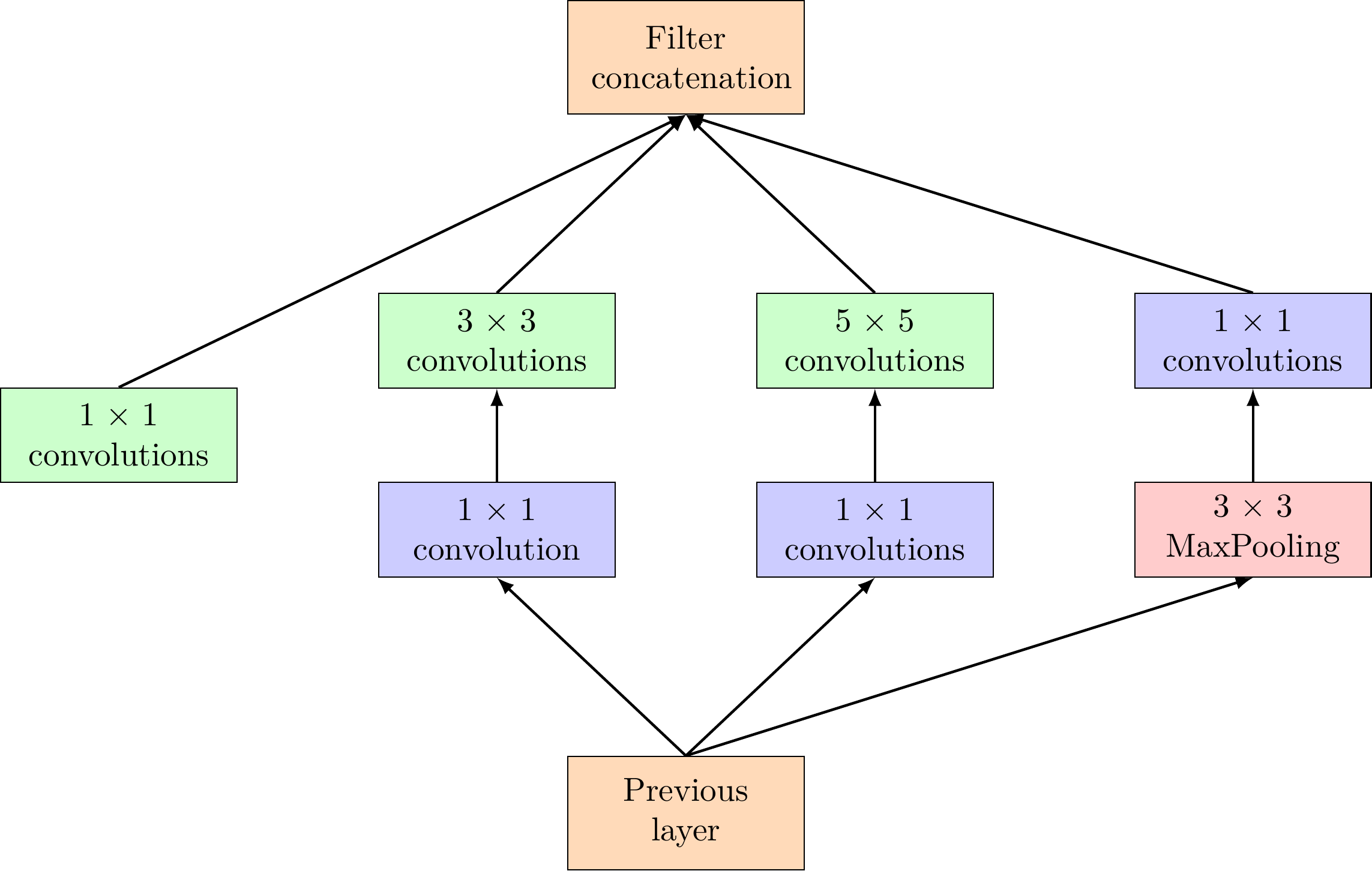
These are the building blocks of GoogleNet. Below is a detailed report on its architecture.
GoogleNet Architecture
The GoogleNet architecture is 22 layers deep, with 27 pooling layers included. There are a 9 inception modules stacked linearly in total. The ends of the inception modules are connected to the global average pooling layer. Below is a zoomed-out image of the full GoogleNet architecture.
The pytorch version of googleNet is illustrated as below1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161from sympy import true
import torch
import torch.nn as nn
class BasicConv2d(nn.Module):
"""This class implements basic conv2d operations"""
def __init__(self, in_channels, out_channels, *args) -> None:
super().__init__()
self.nn = nn.Sequential(
nn.Conv2d(in_channels, out_channels, *args),
nn.ReLU(inplace = True)
)
def forward(self, x):
return self.nn(x)
class InceptionAux(nn.Module):
"""This class implements the inception module in the googleNet infrastructure"""
def __init__(self, in_channels, num_classes) -> None:
super().__init__()
self.inceptionaux = nn.Sequential(
nn.AvgPool2d(kernel_size = 5, stride = 3),
BasicConv2d(in_channels, 128, kernel_size = 1),
nn.Flatten(),
nn.Linear(2048, 1024),
nn.ReLU(inplace = True),
nn.Dropout(p = 0.5),
nn.Linear(1024, num_classes),
nn.Softmax()
)
def forward(self, x):
return self.inceptionaux(x)
class Inception(nn.Module):
"""This class implements inception module"""
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch5x5red, ch5x5, pool_proj) -> None:
super().__init__()
self.branch1 = BasicConv2d(in_channels, ch1x1, kerner_size = 1)
self.branch2 = nn.Sequential(
BasicConv2d(in_channels, ch3x3red, kernel_size = 1),
BasicConv2d(ch3x3red, ch3x3, kernel_size = 3, padding = 1)
)
self.branch3 = nn.Sequential(
BasicConv2d(in_channels, ch5x5red, kernel_size = 1),
BasicConv2d(ch5x5red, ch5x5, kernel_size = 5, padding = 2)
)
self.branch4 = nn.Sequential(
nn.MaxPool2d(kernel_size = 3, padding = 1, stride = 1),
BasicConv2d(in_channels, pool_proj, kernel_size = 1)
)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
return torch.cat([branch1, branch2, branch3, branch4], dim = 1)
class GoogLeNet(nn.Module):
def __init__(self, num_classes=1000, aux_logits=True, init_weights=False):
super(GoogLeNet, self).__init__()
self.aux_logits = aux_logits
self.conv1 = BasicConv2d(3, 64, kernel_size=7, stride=2, padding=3)
self.maxpool1 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.conv2 = BasicConv2d(64, 64, kernel_size=1)
self.conv3 = BasicConv2d(64, 192, kernel_size=3, padding=1)
self.maxpool2 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.inception3a = Inception(192, 64, 96, 128, 16, 32, 32)
self.inception3b = Inception(256, 128, 128, 192, 32, 96, 64)
self.maxpool3 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.inception4a = Inception(480, 192, 96, 208, 16, 48, 64)
self.inception4b = Inception(512, 160, 112, 224, 24, 64, 64)
self.inception4c = Inception(512, 128, 128, 256, 24, 64, 64)
self.inception4d = Inception(512, 112, 144, 288, 32, 64, 64)
self.inception4e = Inception(528, 256, 160, 320, 32, 128, 128)
self.maxpool4 = nn.MaxPool2d(3, stride=2, ceil_mode=True)
self.inception5a = Inception(832, 256, 160, 320, 32, 128, 128)
self.inception5b = Inception(832, 384, 192, 384, 48, 128, 128)
if self.aux_logits:
self.aux1 = InceptionAux(512, num_classes)
self.aux2 = InceptionAux(528, num_classes)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.dropout = nn.Dropout(0.4)
self.fc = nn.Linear(1024, num_classes)
if init_weights:
self._initialize_weights()
def forward(self, x):
# N x 3 x 224 x 224
x = self.conv1(x)
# N x 64 x 112 x 112
x = self.maxpool1(x)
# N x 64 x 56 x 56
x = self.conv2(x)
# N x 64 x 56 x 56
x = self.conv3(x)
# N x 192 x 56 x 56
x = self.maxpool2(x)
# N x 192 x 28 x 28
x = self.inception3a(x)
# N x 256 x 28 x 28
x = self.inception3b(x)
# N x 480 x 28 x 28
x = self.maxpool3(x)
# N x 480 x 14 x 14
x = self.inception4a(x)
# N x 512 x 14 x 14
if self.training and self.aux_logits: # eval model lose this layer
aux1 = self.aux1(x)
x = self.inception4b(x)
# N x 512 x 14 x 14
x = self.inception4c(x)
# N x 512 x 14 x 14
x = self.inception4d(x)
# N x 528 x 14 x 14
if self.training and self.aux_logits: # eval model lose this layer
aux2 = self.aux2(x)
x = self.inception4e(x)
# N x 832 x 14 x 14
x = self.maxpool4(x)
# N x 832 x 7 x 7
x = self.inception5a(x)
# N x 832 x 7 x 7
x = self.inception5b(x)
# N x 1024 x 7 x 7
x = self.avgpool(x)
# N x 1024 x 1 x 1
x = torch.flatten(x, 1)
# N x 1024
x = self.dropout(x)
x = self.fc(x)
# N x 1000 (num_classes)
if self.training and self.aux_logits: # eval model lose this layer
return x, aux2, aux1
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
The detailed architecture and parameters are explained in the image below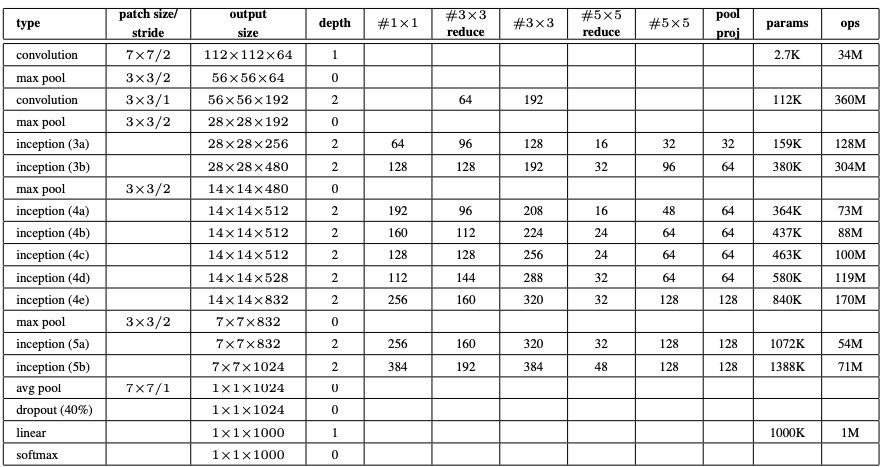
ResNets
After the first CNN-based architecture (AlexNet) that win the ImageNet 2012 competition, every subsequent winning architecture use more layers in a deep neural network to reduce the error rate. This works for less number of layers, but when we increase the number of layers, there is a common problem in deep learning associated with that called Vanishing/Exploding gradient. This causes the gradient to become 0 or too large. Thus when we increases number of layers, the training and test error rate also increases.
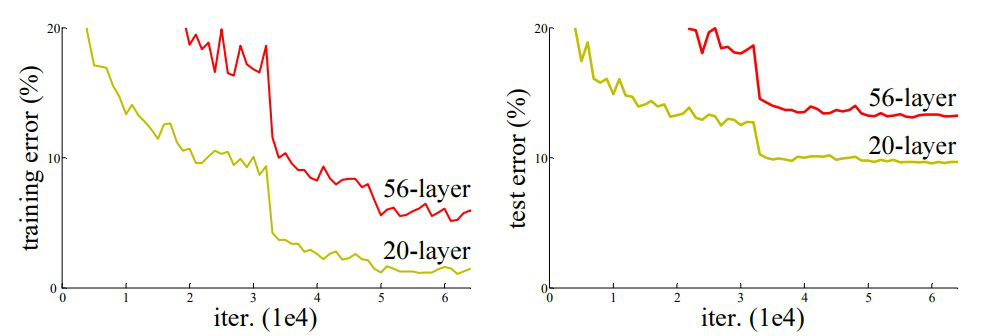
In the above plot, we can observe that a 56-layer CNN gives more error rate on both training and testing dataset than a 20-layer CNN architecture, if this was the result over fitting, then we should have lower traing error in 56-layer CNN but then it also has higher training error. After analyzing more on error rate the authors were able to reach conclusion that it is caused by vanishing /exploding gradient.
ResNet, which was proposed in 2015 by reseraches at Microsoft Research introduced a new architecture called Residual Network.
Residual Block:
In order to solve the problem of the vanishing/exploding gradient, this architecture introduced the concept called Residual Network. In this network we use a technique called skip connections. The skip connection skips training from a few layers and connects directly to the output.
The approach behind this network is instead of layers learn the underlying mapping, we allow network fit the residual mapping. So, instead of say 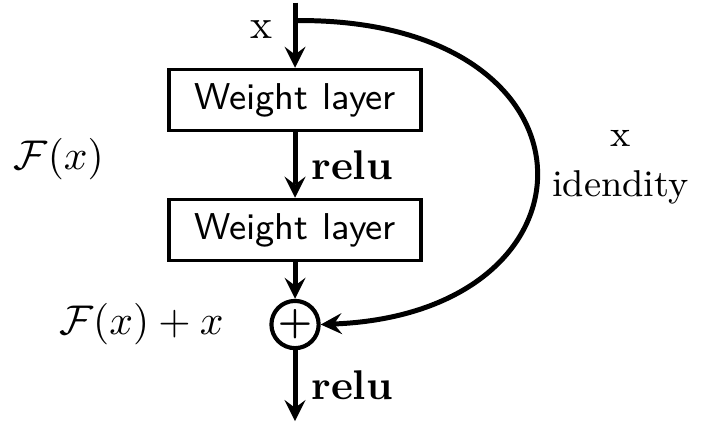
The advantage of adding this type of skip connection is because if any layer hurt the performance of architecture then it will be skipped by regularization. So, this results in training very deep neural network without the problems caused by vanishing /exploding gradient. The authors of the paper experimented on 100-1000 layers on CIFAR-10 dataset. There is similar approach called “highway networks”, these networks also uses skip connection. Similar to LST< these skip connections also uses parametric gates. These gates determine how much information passes through the skip connection. This architecture however has not provide accuracy better than ResNet architecture.
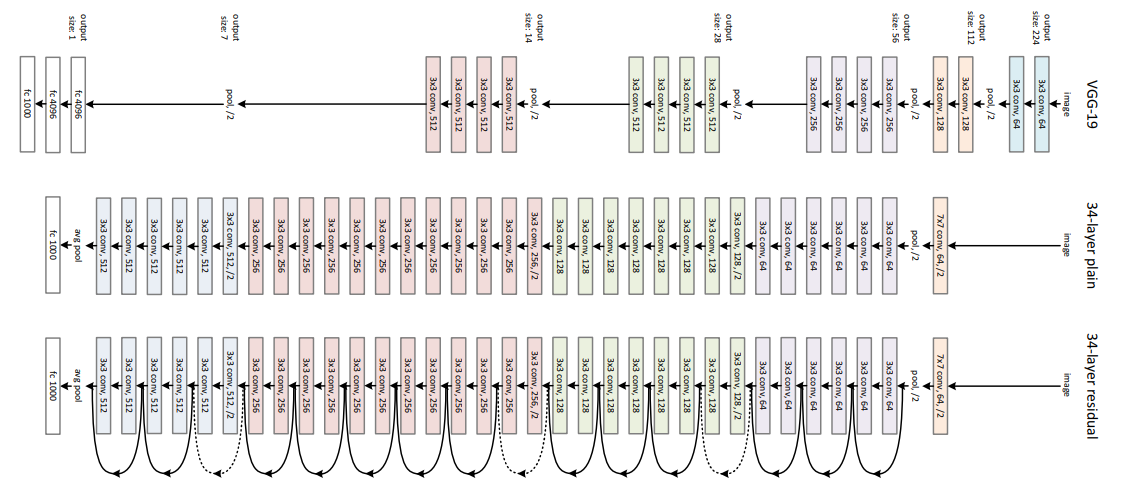
Network Architecture
This network uses a 34-layer plain network architecture inspired by VGG-19 in which then the shortcut connection is added. These shortcut connections then convert the architecture into residual network.
Here I do not provide the pytorch version of this kind work since it is very easy to implement under python.